“海洋物联网”实验室依托广州航海学院/广州交通大学(筹)计算机学院(人工智能学院),在智慧港口、海洋运输安全、海洋物联网等领域具备丰富的研究设备与研究经验,长期承担国家级、省部级科研任务。本实验室致力于实现水下感知、通信、组网、定位、导航、探测等技术的原理验证、算法设计和实验研究,推动智能检测与感知技术在海洋、交通等领域的创新应用,为区域经济和产业发展提供有力支撑。实验室不仅填补了学校在海洋物联网领域的研究空白,还成为重要的科研与人才培养平台。
(1)在智慧港口方面,实验室聚焦于港口水下地形勘测、航道淤堵检测和船舶通过性检测的技术突破。实验设备包括:室内无人船(艇)集群实验平台、智能无人船系统、六自由度姿态定位测试分析系统、无人机测量系统、管道声呐测绘成像系统以及多种水下探测设备。实验室支持的实验方向包括:港口码头海陆空综合三维探测、沿海城市排水管网健康状况检测、港口地形分布式协同探测等,为智慧港口建设提供了关键技术支持。
(2)在智能感知与检修方面,实验室聚焦于船底检测、水下避障、船舶定位与通信、水下图像增强与处理等技术突破。实验设备包括:动态信号测试分析系统、水浸式超声相控阵C扫描系统、高清水下摄像头及补光灯、超声全聚焦采集系统等。实验室支持的实验方向包括:振动信号在船舶设备检验中的应用、船舶无损检测、港口码头石油和天然气管道泄漏点检测等,为船舶智能化运行与维护提供了先进的解决方案。
(3)在海洋监测物联网络方面,实验室聚焦于创新的网络结构、通信算法、海洋监测的技术突破。实验设备包括:在线式温度链物联网系统、TD传感器、CTD传感器、多参数水质传感器等。实验室支持的实验方向包括:海洋牧场海水温度在线监测、水下传感网络平台系统集成、水质环境监测数据采集与处理等,为海洋科学研究和资源调查提供了全面的支持。
实验室部分设备如下:
一、水浸式超声相控阵 C 扫系统

水浸式超声相控阵C扫系统具有高分辨率、精确定位和成像能力,能够实时获取物体内部的细节信息,尤其适用于复杂结构的无损检测。通过控制超声波的发射角度和接收信号,可以提高检测效率,且不受表面形状的影响,适用于不同材质的检测。
二、室内无人船(艇)集群试验平台
能提供受控环境下的集群协作测试,能够模拟复杂水域和环境条件,验证无人船(艇)的自主导航、路径规划和集群协作能力。
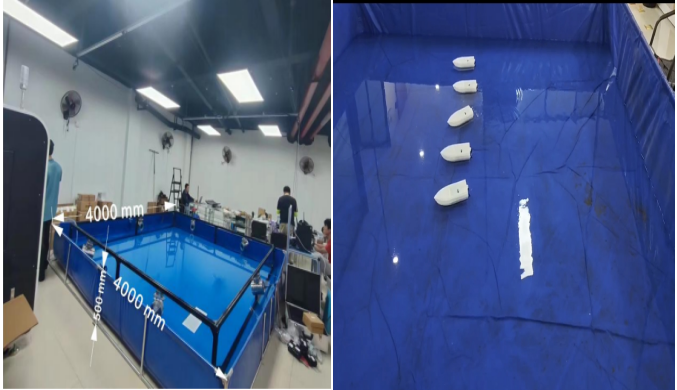
三、钢化玻璃水池

钢化玻璃水池搭载的造浪机结合了高强度透明材料与动态波浪效果,既安全耐用又具视觉冲击力。造浪机能够模拟自然波浪,广泛应用于实验研究与水动力学场景,增强系统功能表现与动态水流特性的研究价值。
四、浮标平台

支持水下监测与环境数据采集,具备实时通信功能;模块化设计,支架高度可调;太阳能供电,适应全天候运行;配备防撞圈与锌块,抗冲击防腐蚀。
五、无人船

微小嵌入型侧扫声呐适配USV/ROV,LFM与CW模式切换,超低功耗设计。最大深度300米,供电9~18V DC,支持XTF格式输出。BS3无人船系统支持测深、侧扫操作,自动化航线规划,DXF底图导入。无人船能执行危险任务、提高效率,并具备自动导航和长时间作业能力。
六、便携式ROV

支持自动定向、定深及6自由度潜航模式;搭载水下低光摄像机(1080P)和LED灯(3000流明);提供实时视频传输、路径规划、深度传感及安全警报功能;可通过QGC软件进行全功能操控与参数设置。
七、无人机测量系统

无人机具有高稳定性、高清拍摄能力和智能飞行功能,能够进行精准定位、避障和自动飞行路径规划。其长续航和便捷设计使其适合多种应用场景,如航拍、测绘和监控。
八、水下高清摄像头

水下彩色高清网络摄像头(SOIPC 系列)是一种坚固耐用的设备,具有800万像素高清分辨率,支持H.265AI/H.265+视频压缩技术,提供清晰细腻的影像,且兼容多种网络协议(如ONVIF和RTSP)。此外,通过RTSP协议可实时获取视频流,且支持图片抓拍功能,操作简便灵活,适合多种水下应用场景。
九、水下补光灯

水下补光灯(SOLED 系列)采用铝合金材质外壳,设计坚固紧凑,耐压深度可达200米,适用于水下摄像头补光和AUV导引等场景。其主要特点包括高亮度、高发光效率、快速散热以及长寿命(LED寿命达5000小时,保持80%亮度)。灯光支持多种颜色选择。
十、3D打印机
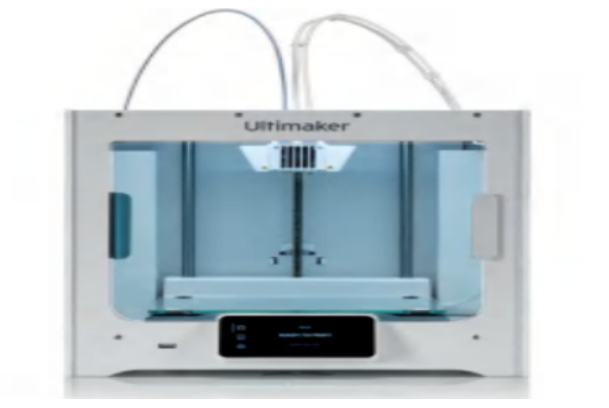
具备精确性和速度,支持双喷头打印技术,带有自动喷嘴提升系统和可交换的PrintCore,成型尺寸为XYZ:230 x 190 x 200 mm,耗材直径为2.85 mm,打印精度高,打印机还具备材料识别功能,通过NFC扫描仪自动识别材料,连接方式包括Wi-Fi、LAN、USB端口,配备4.7英寸彩色触摸屏,支持多种语言。
十一、声速剖面仪

SVP1500声速剖面仪是一款高精度、高效能的水中声速剖面测量设备,广泛应用于海洋调查、水下测绘、导航定位以及水下工程等领域。
十二、水声网络通信机
水声通信机支持21~27kHz频段水声通信,支持OFDM/MFSK调制。提供ID设置、功率调整、网络组网等功能。数据传输支持PC文件交互。串口波特率:默认为115200。最大通信深度:300米。
十三、水声信标

该USBL设备支持水下声学定位和通信,具备高精度目标追踪与定位能力,适用于多种水下作业场景。
十四、动态信号测试分析系统

动态信号测试分析系统能够实时捕捉和分析快速变化的信号,提供高精度的频率响应和时域分析。其优点包括高采样率、强大的数据处理能力,能够精确分析复杂信号的特性,广泛应用于振动、噪声和机械故障检测等领域。
十五、水下教学光通信设备
该系统支持多参数水质仪、水下摄像头、水声通信机等多种设备的接入与管理,可配置载体平台位置和网关地址,实现实时设备状态同步,具备水质数据主动获取、水下摄像头抓拍及水声网络通信机功率与模式配置等功能。
十六、船用航海雷达

采用全固态Instant On™技术,无需预热时间,能够即时启动并提供雷达图像。它们具有多种雷达探测距离选项,Halo20/20+雷达探测距离为24至36海里,Halo24雷达探测距离更远,可达89公里(48海里),并提供 18个范围设置,满足不同航行环境的需求。
十七、多波束成像声呐

SV1203D微型前视声呐是一款二维前视多波束成像设备,设计用于清澈或浑浊水体中的目标探测与识别、避碰以及探障等任务。其特点是体积小、重量轻、功耗低,提供完全国产化版本,并支持最大工作深度4公里。
十八、数字水听器
HY-BAS007自容式水听器是一种集传统模拟水听器、放大调理电路、采集、存储、数据传输为一体的新型水声信号测量单元。
十九、多参数水质仪

Aquaread的多参数水质仪是一款高度集成的水质监测设备,具备自清洁功能,能够有效减少维护需求。它配备了一系列预先安装的常见水质测试传感器,包括pH、ORP、EC、TDS、SSG、电阻率、盐度、DO、深度和温度等,还带有四个辅助接口,可添加离子选择传感器或光学传感器以满足特定监测需求。
二十、惯性导航模块

ADIS16488A iSensor®是一款完整的惯性系统,内置一个三轴陀螺仪、一个三轴加速度计、一个三轴磁力计和一个压力传感器。
每个惯性传感器都实现了业界领先的技术与信号调理技术的完美结合,可提供优化的动态性能。
二十一、DVL多普勒计程仪

WaterLinked DVL凭借其小体积、高性价比和高性能,不仅是ROV的理想选择,也是USV和AUV的理想选择。DVL凭借其高性能、超小型4波束Janus阵型结构布置,同时内部集成AHRS/MU,增加传感器精度和稳定性。
二十二、超声全聚焦采集系统

超声全聚焦采集系统提供高分辨率成像,能同时从多个角度采集数据,精确检测复杂结构和内部缺陷。其聚焦技术提升了成像深度和精度,适应多种材料。采样率:100/200MHz。
二十三、六自由度姿态定位测试分析系统

六自由度姿态定位测试分析系统能够精确测量和分析物体在三维空间中的运动和姿态变化,提供高精度的定位数据,广泛应用于导航、控制和仿真测试。
二十四、管道声呐测绘成像系统

管道声呐测绘成像系统能够在不破坏管道结构的情况下,对管道内部进行高精度检测和成像,实时提供管道的结构状态、缺陷位置及尺寸等信息。其应用广泛,特别适用于复杂管道的检测,能够有效识别腐蚀、裂缝等问题,确保管道安全运行并降低维护成本。
二十五、TD传感器

TD传感器是一种高精度、多功能的水下传感设备,具有卓越的测量性能和可靠的稳定性,适合多种水下环境应用。该传感器能够精确测量温度、盐度和压力,并推算出声速等海洋学关键参数。适用于极端水下作业场景。
二十六、单波束成像声呐

二维扫描声呐是一种高分辨率、小型化、多功能声呐设备,主要用于水下目标探测、识别及避碰。其采用全数字双频工作模式,结合一体化数字信号处理技术,兼顾远距离探测和近距离高分辨率成像。